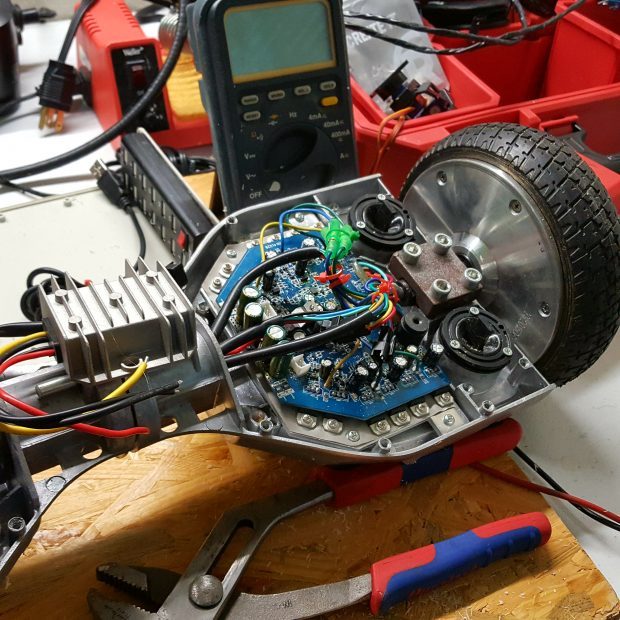
During my latest testing phase, there was an accident with the motor controller. This has put a small speed bump in my little project.
However, this may be a blessing in disguise. I wanted to put in my own motor controller before, but I was trying to do this build without purchasing much. So, I was using the built-in controller within the old hover board housing. This came with many obstacles; for one, the circuit was very sensitive to change. If I wanted it to work; the LEDs and everything had to be perfect. Otherwise it would throw errors. Keeping in mind that I do not have any manual, documentation, etc on the hardware here.

Once I replace their motor controller with mine, it will be even better for my automation. I actually do have RPI motor controller HATs; however nothing rated for 500w. So I am going to be using the following per side. http://a.co/eHzWM2i
This will allow me to control the speed with the battery, and hub motors I already have. Just add a potentiometer per side, and were in business. Those pots will be controlled via very small servo. This will allow the user to control them, but the servos will put them back to zero (stop) after use. This also enables the control via RPI3, as I mentioned before.
On another note; I am considering using casters in the front since you will be able to steer via the controls. Alternatively, I get one controller and use it as a throttle only. This would work, but then I would have to have front steering.
Thanks for all the support,
Matt Curry