 I have been quietly working on the installer and image. However, there have been 2 OS updates since I started. So I am refreshing all of my images with Raspbian Stretch. I will be making it available soon.
I have been quietly working on the installer and image. However, there have been 2 OS updates since I started. So I am refreshing all of my images with Raspbian Stretch. I will be making it available soon. Also, if anyone has a class 10, 4GB MicroSD they want to donate. I am trying to make the image as small as possible. Please contact me directly for details.
The new Image will be based on Raspbian Lite as mentioned above, and will have the basic dependencies met. It will also have newer versions of all the software pre-compiled to save you the hours of time it can take.
I am working on software to auto-configure most audio devices. This is something I hope to include soon. Please keep an eye out for the new links.
Thanks,
Matthew Curry
[UPDATE]
Thank you to TJUMP7 for the 4gb Card! Small Image coming soon! Keep an eye out for that and the installer….
[UPDATE] 01/24/2018 – After being out for a while for personal reasons, I am glad to say I am back. I will be working on the updates/releases soon.
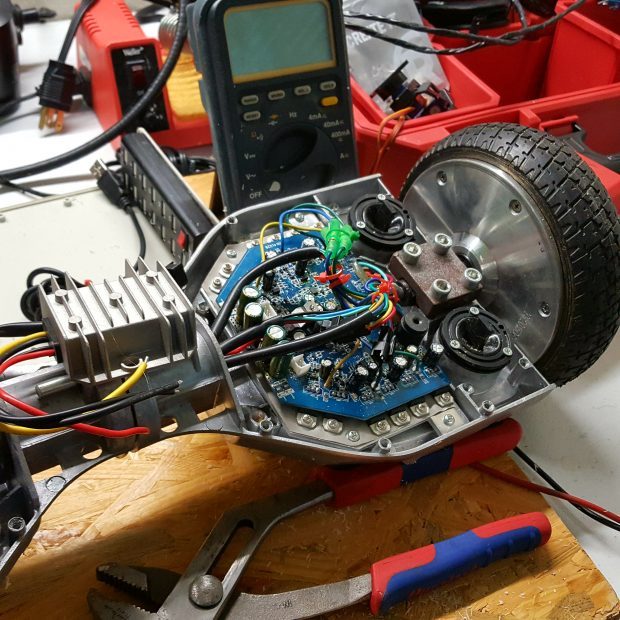



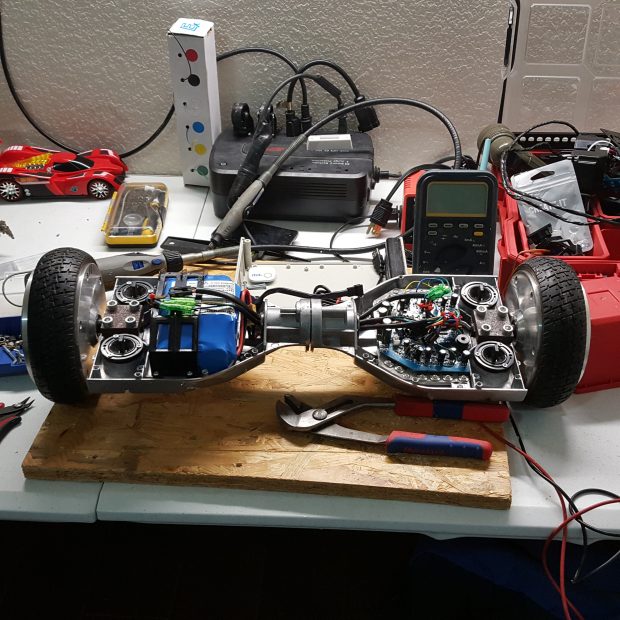
 This will include software, and hardware measures to ‘take over’ the device, and even limit speed. Eventually I will be able to return him back to a certain spot with playtime is over. I hope to automated charging as well eventually. There are a lot of features I have ready; however I am still building out the hardware.
This will include software, and hardware measures to ‘take over’ the device, and even limit speed. Eventually I will be able to return him back to a certain spot with playtime is over. I hope to automated charging as well eventually. There are a lot of features I have ready; however I am still building out the hardware. Once testing is completed, and it works; I will go through how I set it up. However, this will be piece by piece as I do it. I have even considered some youtube videos. However, that will depend on my success in doing this on a budget. I am also using completely reclaimed parts, minus a couple bolts I bought. So its been free so far.
Once testing is completed, and it works; I will go through how I set it up. However, this will be piece by piece as I do it. I have even considered some youtube videos. However, that will depend on my success in doing this on a budget. I am also using completely reclaimed parts, minus a couple bolts I bought. So its been free so far.