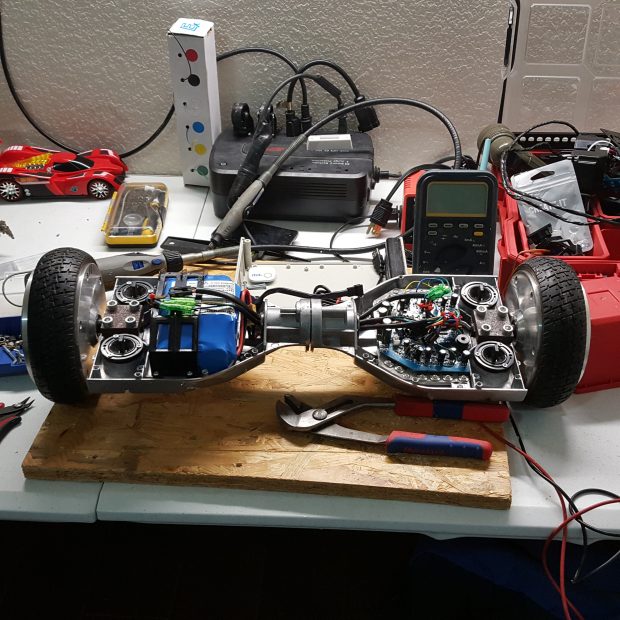
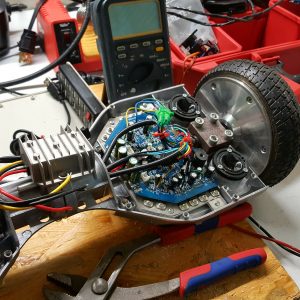
I am building a robot (named aptly: Kill Switch) from old parts I had laying around, and it is powered by hub motors from a ‘hover-board’. The stats were pretty strong for small kids; so I am building a lot of safety into it.
 This will include software, and hardware measures to ‘take over’ the device, and even limit speed. Eventually I will be able to return him back to a certain spot with playtime is over. I hope to automated charging as well eventually. There are a lot of features I have ready; however I am still building out the hardware.
This will include software, and hardware measures to ‘take over’ the device, and even limit speed. Eventually I will be able to return him back to a certain spot with playtime is over. I hope to automated charging as well eventually. There are a lot of features I have ready; however I am still building out the hardware.
This can be difficult to do and keep extremely safe. So for starters I am testing it only; and I have 2 kill switches I am putting in to ensure safety. One the person will have to keep his foot on constantly for the buggy to run. The other is a simple quick kill switch. (Eventually these will be automated).
The Device already has an RPI3 with a small motor-controller for future automation’s. This will control other aspects of the vehicle via software. Such as speed limitations, power usage, GPS, WIFI, BT. I will also be using a pico router to establish a LAN around the device. This is for media, as the vehicle will have speakers/screen to watch/host media on the LAN.
Hardware Safety Features:
- Dash Kill Switch
- Foot Kill Switch
- Flip/Tilt Sensor
- Lights
- Front
- Rear
 Once testing is completed, and it works; I will go through how I set it up. However, this will be piece by piece as I do it. I have even considered some youtube videos. However, that will depend on my success in doing this on a budget. I am also using completely reclaimed parts, minus a couple bolts I bought. So its been free so far.
Once testing is completed, and it works; I will go through how I set it up. However, this will be piece by piece as I do it. I have even considered some youtube videos. However, that will depend on my success in doing this on a budget. I am also using completely reclaimed parts, minus a couple bolts I bought. So its been free so far.
On that note, I have been building the chassis, but if anyone in the Dallas, TX area has an old go-cart frame that rolls/steers, I am looking. I think it would make it a lot lighter. Shoot me a message, info is on my contact me page.
MUCH More to come… Please keep an eye on the series…
-M
 Much like many of us, I use nano. Its quick, easy, and readily available. However, I like to see the highlighting of my language. As many of you know, there are “nanorc” files, that will tell nano how to handle language highlight.
Much like many of us, I use nano. Its quick, easy, and readily available. However, I like to see the highlighting of my language. As many of you know, there are “nanorc” files, that will tell nano how to handle language highlight.