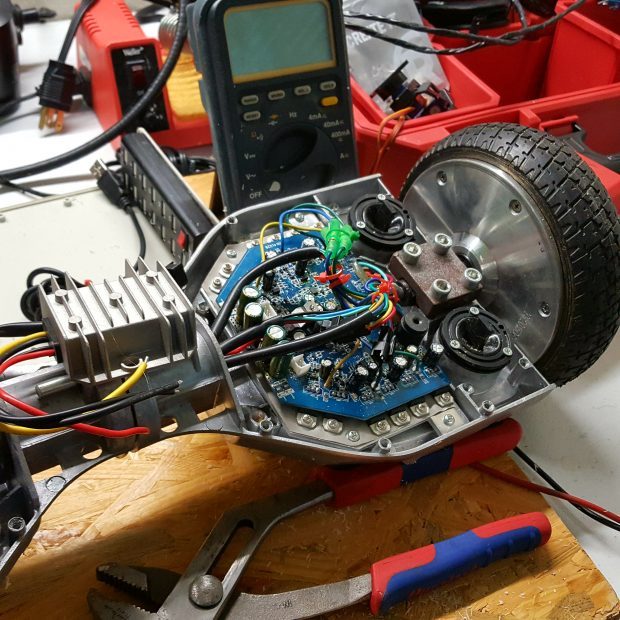
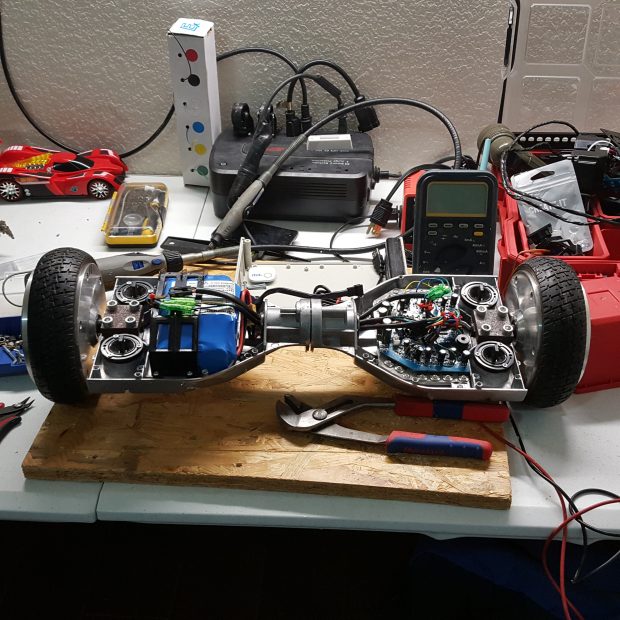
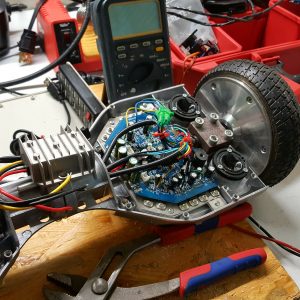
I am building a robot (named aptly: Kill Switch) from old parts I had laying around, and it is powered by hub motors from a ‘hover-board’. The stats were pretty strong for small kids; so I am building a lot of safety into it.
 This will include software, and hardware measures to ‘take over’ the device, and even limit speed. Eventually I will be able to return him back to a certain spot with playtime is over. I hope to automated charging as well eventually. There are a lot of features I have ready; however I am still building out the hardware.
This will include software, and hardware measures to ‘take over’ the device, and even limit speed. Eventually I will be able to return him back to a certain spot with playtime is over. I hope to automated charging as well eventually. There are a lot of features I have ready; however I am still building out the hardware.
This can be difficult to do and keep extremely safe. So for starters I am testing it only; and I have 2 kill switches I am putting in to ensure safety. One the person will have to keep his foot on constantly for the buggy to run. The other is a simple quick kill switch. (Eventually these will be automated).
The Device already has an RPI3 with a small motor-controller for future automation’s. This will control other aspects of the vehicle via software. Such as speed limitations, power usage, GPS, WIFI, BT. I will also be using a pico router to establish a LAN around the device. This is for media, as the vehicle will have speakers/screen to watch/host media on the LAN.
Hardware Safety Features:
- Dash Kill Switch
- Foot Kill Switch
- Flip/Tilt Sensor
- Lights
- Front
- Rear
 Once testing is completed, and it works; I will go through how I set it up. However, this will be piece by piece as I do it. I have even considered some youtube videos. However, that will depend on my success in doing this on a budget. I am also using completely reclaimed parts, minus a couple bolts I bought. So its been free so far.
Once testing is completed, and it works; I will go through how I set it up. However, this will be piece by piece as I do it. I have even considered some youtube videos. However, that will depend on my success in doing this on a budget. I am also using completely reclaimed parts, minus a couple bolts I bought. So its been free so far.
On that note, I have been building the chassis, but if anyone in the Dallas, TX area has an old go-cart frame that rolls/steers, I am looking. I think it would make it a lot lighter. Shoot me a message, info is on my contact me page.
MUCH More to come… Please keep an eye on the series…
-M